Crazyflie是国外顶尖的开源微型四轴项目,这个疯狂的飞行器Crazyflie仅仅9厘米* 9厘米,有两种不同的版本,区别在于传感器的数量,10传感器和6传感器版本。
10传感器包括:MPU6050六轴陀螺仪传感器,三轴地磁传感器,气压传感器。
6传感器版本少地磁和气压。
官方资料:

从左到有依次为:正反浆,电机,主控板,双面胶,无线收发模块,天线,电机座和电池。
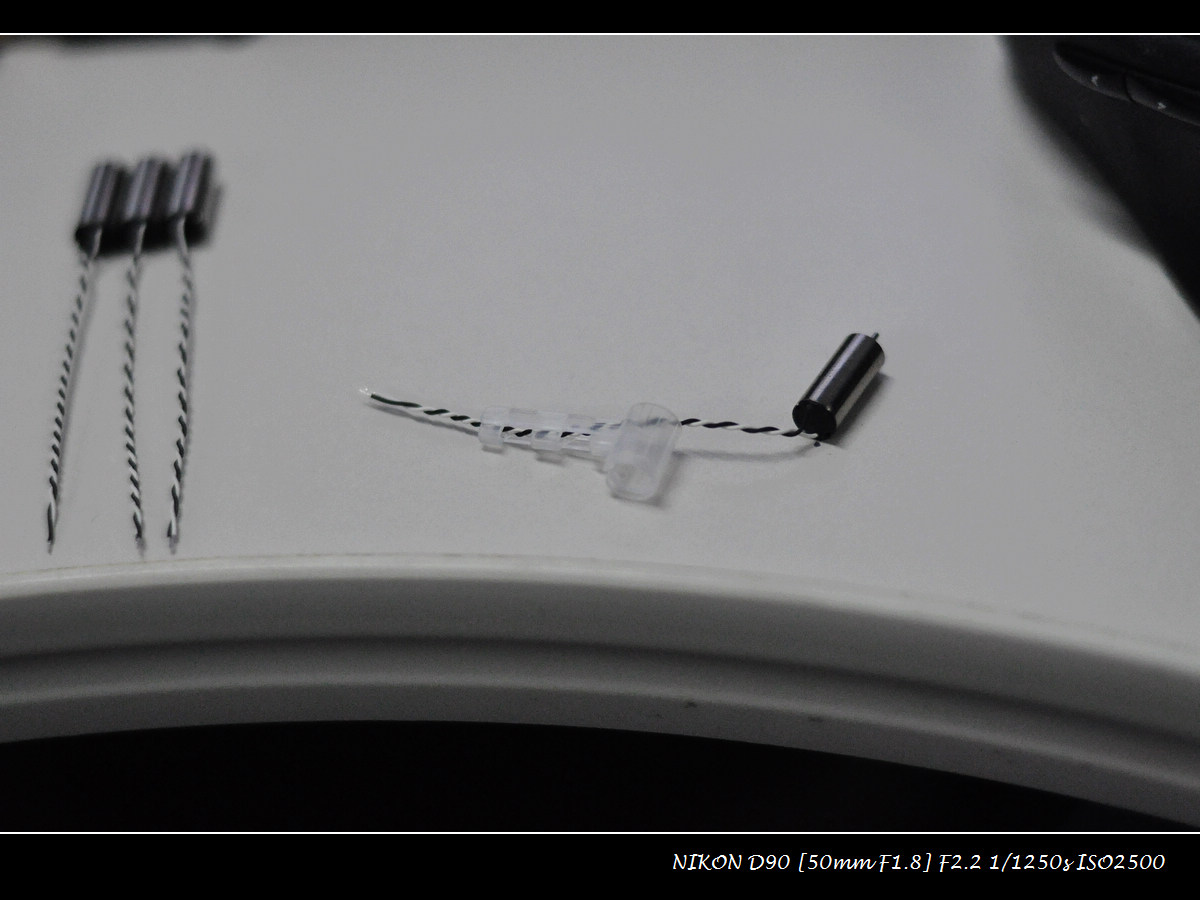
把电机引线拧成麻花状(别太使劲拧断了),防止飞线乱飞,引线穿过电机座。

把电机座装在主控板上,注意正反,第一次有点紧,嗯……咳……使劲,嗯……插到底。
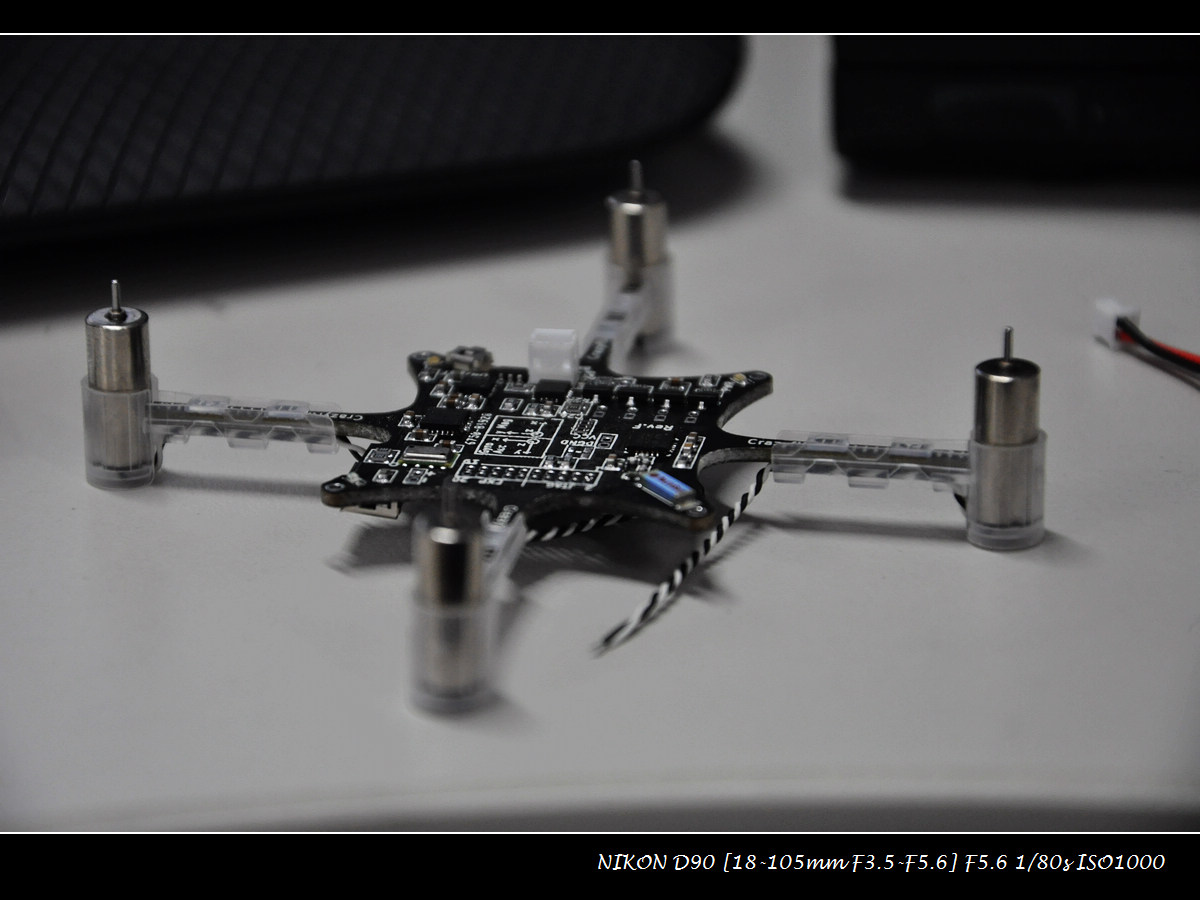
四个电机安装完如图所示

按如图所示焊接电机引脚,注意最上面是标有M1标志的电机。
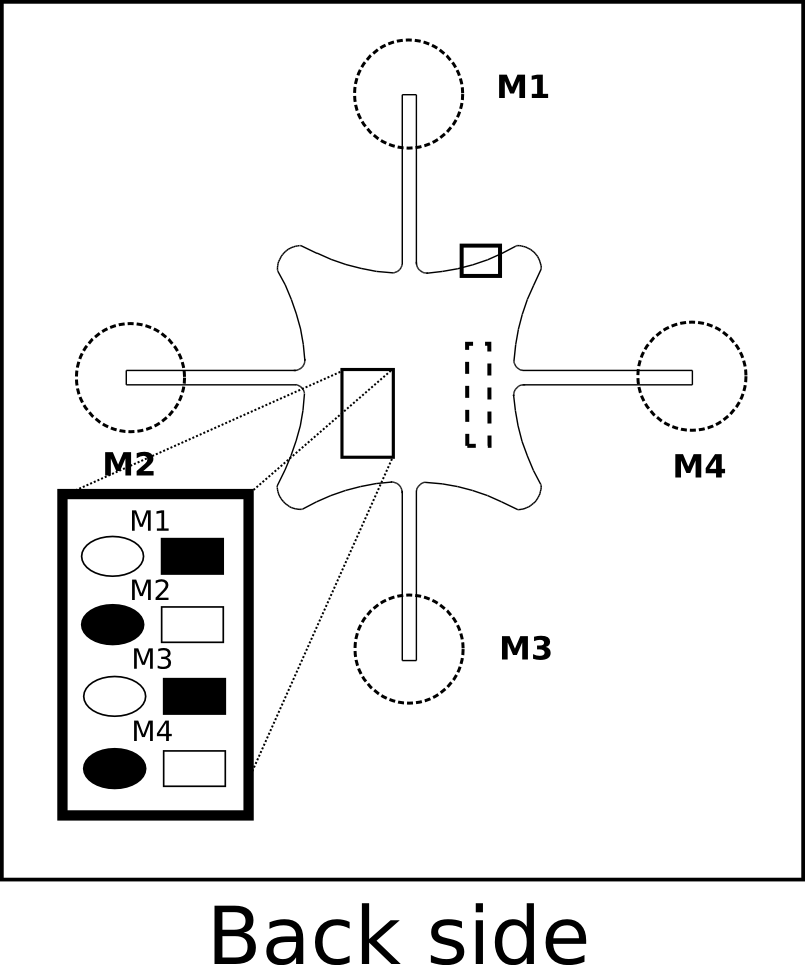
其它的引脚依次左右交换焊接。

螺旋桨分正浆和反浆,凸面朝上安装。
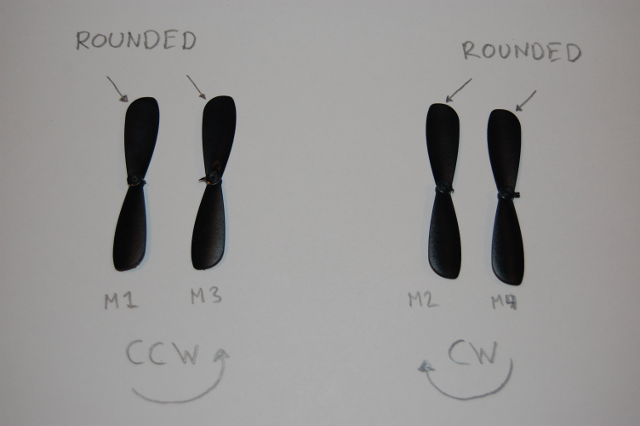
对角为相同的螺旋桨,相邻为不同螺旋桨,带字母A的浆装M2和M4上。
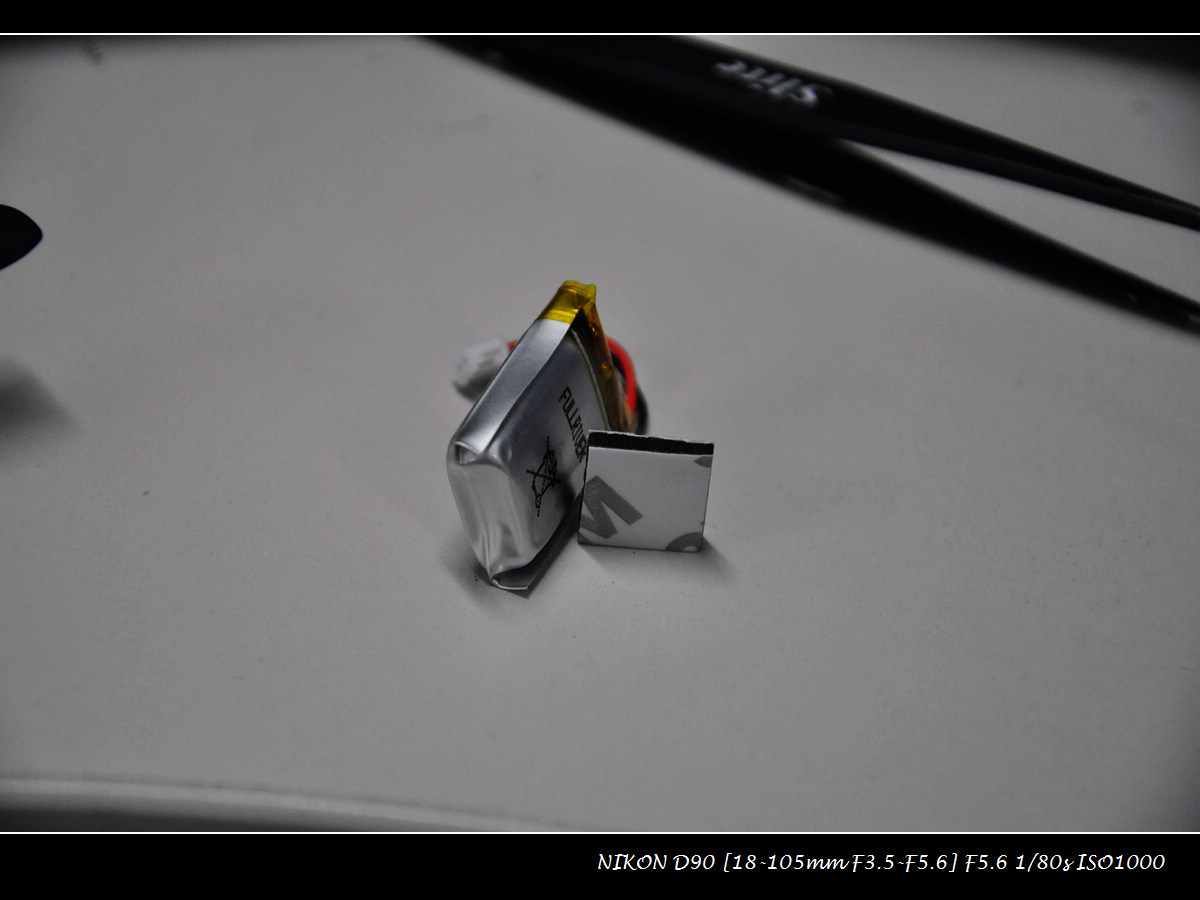
剪一小块合适大小的双面胶把电池贴在主控板合适的位置上。

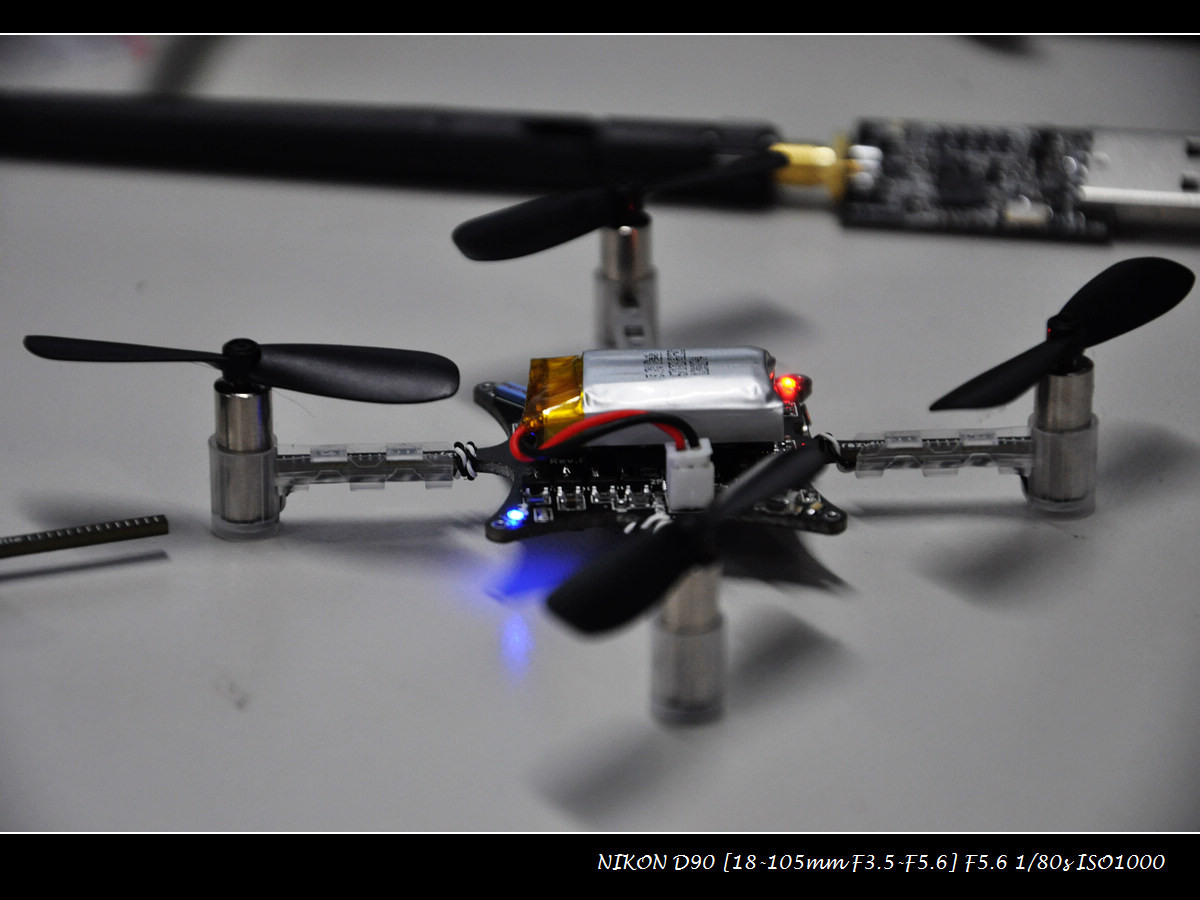
接上电源。

接上crazyradio,打开crazyflie的客户端。
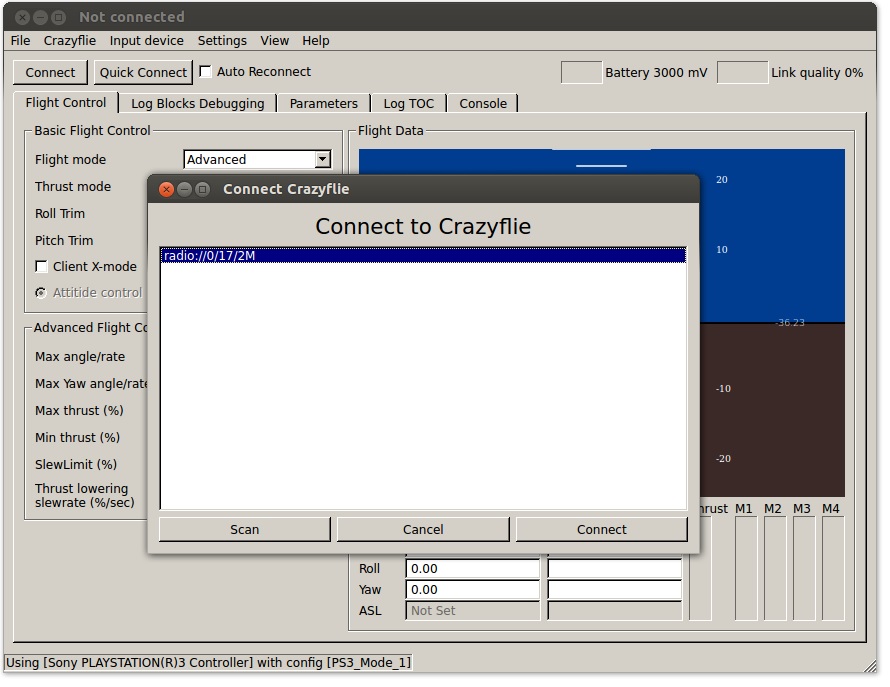
搜索无线信号,crazyflie的信号都是以radio开头,后面的频道/速率可以修改,防止2.4G信号冲突,默认为radio://0/0/250k。
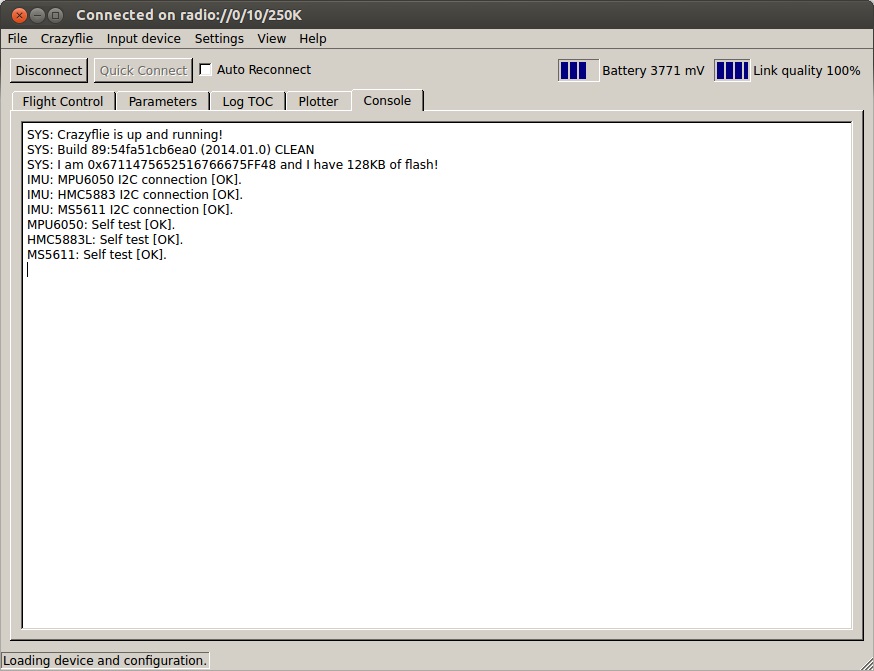
双击连接后,可观察console信息,包含传感器自检信息,如果是6传感器的,HMC5883和MS5611会提示fail。

连上后,主界面会显示电池电量和信号质量,倾斜crazyflie,相应的飞行姿态会在窗口中展现出来。
